How Do Calnetix Active Magnetic Bearings Transform Efficiency and Reliability?
Unlocking Superior Performance and Sustainable Solutions
Key Benefits of Calnetix Magnetic Bearings
Calnetix offers Powerflux™ Magnetic Bearings in radial and side-by-side combination configurations and Xcelflux™ Magnetic Bearings with a unique coil architecture. The unique advantages of these active magnetic bearings (AMBs) include the following:
Non-contact Support
When designing high-speed rotating machinery, Calnetix’s active magnetic bearings afford unique advantages over conventional roller or fluid-film bearings. Unlike conventional bearings, AMBs suspend the target rotor in a magnetic field, creating a non-contact rotor support system with extremely low friction and no contact wear.
Some benefits of contactless magnetic bearings include:
- Low power losses and heat generation
- Higher achievable speed
- Low audible noise
Minimized Vibration for Precision Applications
Calnetix utilizes an adaptive synchronous force rejection algorithm to minimize vibration transferred from the rotor to the housing. Low transmitted vibration is important in high-precision applications like those in the food, medical, and defense industries.
The benefits of low-vibration transmissibility include:
- Minimizes magnetic bearing structural vibration
- Reduces magnetic bearing dynamic loading
- Reduces Magnetic Bearing Controller (MBC) power consumption
- Significantly lowers audible noise
Advanced Health Monitoring & Diagnostics Capabilities
Calnetix’s active magnetic bearing (AMB) products allow the user to monitor the health of all aspects of the magnetic bearing system. Calnetix’s AMBs include a position sensor, a magnetic actuator, and a microcontroller, which allow the user to access machine health monitoring and diagnostics information. Connect to an external computer to easily identify, analyze, and archive the health and historical performance of the machine via advanced diagnostics. Furthermore, adding Calnetix’s high-frequency data capture hardware and interface can enhance health monitoring capabilities.
Some of the health-monitoring features include:
- Easy monitoring with live vibration
- Ability to monitor bearing loading in all axes
- Ability to record advanced data and fault logging
- Optional data acquisition add-on to provide higher-quality and higher-resolution data
Innovative Integrated Design Approach
In most cases, Calnetix leverages its broad multidisciplinary in-house expertise to work with a customer to design an entire machine on magnetic bearings from the ground-up. This approach is far more effective than simply supplying magnetic bearing components. Calnetix has found that this approach achieves optimal machine performance as an integrated system and fully realizes the magnetic bearing system potential.
Some of Calnetix’s competitive advantages include:
- A wide range of in-house subject matter experts, including mechanical, electromagnetic, rotordynamic, thermal, and electronic design and analysis
- Refined proprietary design and optimization codes that allow for quicker generation of optimized magnetic bearing geometries with fewer iterations
- Analytical solutions derived from the combination of in-house and third-party Finite Element Analysis (FEA) modules
Cutting-edge Graphical User Interface for Easy Navigation
Calnetix has developed a novel Graphical User Interface (GUI) to give both end users and specialists an intuitive way to interact with the inherent benefits of a magnetic bearing system. Furthermore, Calnetix has undertaken a continuous improvement process to refine and upgrade the GUI by incorporating feedback from both internal and external customers. The GUI provides insight into all aspects of magnetic bearing and machine performance.
The GUI is the platform for system setup, monitoring, and diagnostics, including the following:
- Automated mechanical clearance checks
- Automated electrical connection tests
- Levitation of the rotor to any desired position for operation or testing needs
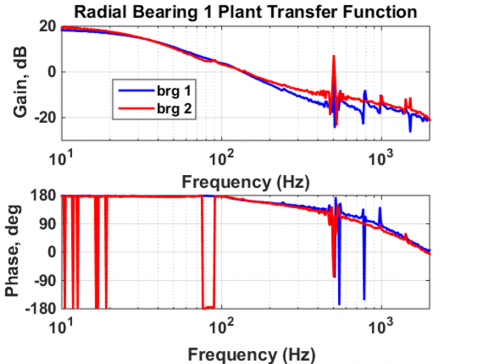
- Commissioning made simpler with built-in transfer function and frequency response tools
Our Innovative Magnetic Bearing Products
Powerflux™ AMBs utilize homopolar permanent-magnet-bias magnetic fields in conjunction with an electromagnetic field. In contrast, Xcellflux™ AMBs use heteropolar electromagnetic bias fields in conjunction with electromagnetic control fields. Both products are low-cost and easy to assemble, as shown and described below.
PowerFlux™
XcelFlux™
PowerFlux™
- Permanent magnet (PM) bias
- Homopolar design
- Combination of radial and axial bearing
- High performance with low power losses and low cooling requirements
- Suitable for high-performance and precision applications, including defense, space, power generation, and turbomachinery below 1 MW capacity.

ESSENTIAL COMPONENTS OF MAGNETIC BEARINGS
Magnetic bearings do not function independently; they require multiple precision components to work together in a unique system. Calnetix has carefully designed and developed all of the active magnetic bearing system components, as described below.
Actuators
Position Sensors
Speed Sensors
Backup Bearings
Magnetic Bearing Controller
Graphical User Interface
Actuators
The actuator in an active magnetic bearing is the electromagnet that applies a controlled force to the shaft of a machine to control its position. A radial actuator consists of a lamination stack with control coils and poles arranged to give two orthogonal axes of control. Conventional AMB actuators produce a linearizing flux using a DC current. However, Calnetix actuators use a permanent magnet arrangement to produce a linearizing bias flux. This leads to lower losses, lower complexity, and improved compactness. Two other common actuator configurations are a combination radial/axial actuator and a stand-alone axial actuator.
An AMB actuator must be connected to a Magnetic Bearing Controller (MBC) which supplies the control current to the coils based on a position sensor feedback signal and a control algorithm.
Check our detailed PM Bias Resource Page to learn about the operational principles of a homopolar, permanent magnet-biased active magnetic bearing.

Position Sensors
Position sensors are critical components of any active magnetic bearing. Their role is to continuously provide the controller with accurate up-to-date information about the rotor position unaffected by the external factors. They must be immune to external factors such as speed, temperature, dust, working fluids, external magnetic and electrical fields, etc.
Significant progress has been made in developing self-sensing AMBs, that combine position measurement and force generation functions into one physical component. However, such combination units have fundamental performance limitations, likely limiting their use to low-cost, low-speed machines. A conventional bearing arrangement utilizing dedicated radial and axial sensors will likely remain dominant.
Different types of position sensors have different property combinations, making some more suitable for specific applications than others. In industrial-use environment, it is typically preferable to have one technology that covers as many applications as possible. When considering the wide breadth of available technologies, such as optical, capacitive, and electromagnetic position sensors, electromagnetic position sensors are the most universal solution.
Calnetix utilizes four types of sensors, depending on the application specifics:
- Radial Reluctance Sensors
- Axial Reluctance Sensors
- Constant -Flux Axial Edge Sensors
- CBR Eddy-Current Sensors
All sensors include the sensitive element (sensor head) integrated into the machine, where the displacement needs to be measured. Conversely, the sensor electronics are typically located in the Magnetic Bearing Controller (MBC).

Speed Sensors
A speed sensor provides the active magnetic bearing with information about the rotational speed and angular position of the rotor. This information is required to adjust the control parameters as speed changes to enable the rotor unbalance cancellation. Calnetix uses two types of dedicated speed sensors. Both sensors utilize a source of a DC magnetic field and a Hall-effect element that measures that field. They also contain additional rotor features, such as a notch which modulates the magnetic field.
- Smart Speed Sensors - The smart speed sensors utilize a built-in magnet as the magnetic field source, two Hall-effect sensors for the differential field measurement, and an internal logic controller that looks for periodic patterns in magnetic field variations over time, interpreted as speed. Since these sensors are designed to look for any periodic pattern of the magnetic field, regardless of the field intensity levels, they do not need any calibration and are very easy to use. On the downside, they do not offer any flexibility in sensitivity adjustments, which may be needed in some applications.
- Programmable Speed Sensors - These sensors utilize two programmable Hall-effect sensors and an external magnetic field source. The parameters of the programmable Hall-effect sensors can be adjusted to address specifics of a particular application. These sensors are often integrated into the “dead poles” of the radial actuators to take advantage of the available actuator bias magnetic field. This significantly reduces axial length of the machine, allowing for higher rotordynamic margins.
Backup Bearings
Backup bearings support the rotating assembly when the magnetic bearing system is deactivated. They also provide rotor support in the event of an overload of the magnetic bearings or a failure of one of the components. During normal operation, the backup bearings are inactive, and have a small radial and axial clearance to the rotating assembly. This radial clearance is, usually on the order of 0.003”-0.009”.
Calnetix’s most common backup bearing configuration is two Duplex stainless-steel pairs of angular contact ball bearings preloaded face-to-face (DF). This mounting configuration requires the bearing outer races to be clamped – either rigidly or via a spring – on the outer race of the bearing. Hybrid bearings are available as backup bearing options, typically fabricated from conventional SAE 52100 steel races and SiN3 balls. Backup bearings for high-speed active magnetic bearings are usually cageless and use either a grease film, dry film lubricant or a light grease fill.

Magnetic Bearing Controller
Calnetix Technologies has developed and deployed advanced Magnetic Bearing Controllers (MBCs) that contain all of the elements necessary to operate magnetic bearing systems.
The company currently produces two MBC platforms in the Insight™ series and one in Concurrence™ series.
For more information, visit the Magnetic Bearing Controllers product page.

Graphical User Interface
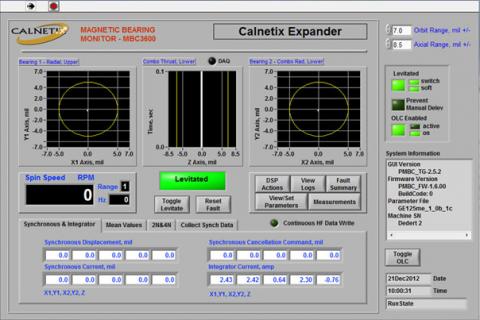
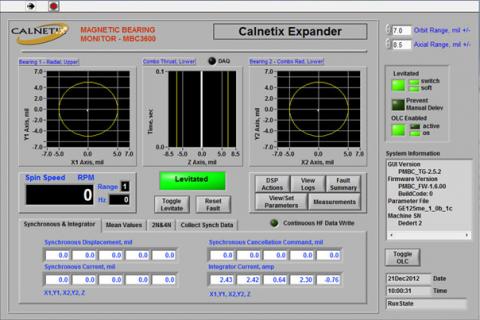
The Calnetix Service Graphical User Interface (GUI) is used for system setup, monitoring, diagnostics and system identification. The upper half of the front panel, shown below, displays orbit plots from the two radial bearing sensors as well as a time history plot from the axial bearing sensor. Other operating variables shown on the GUI include spin speed, static current, and synchronous displacement and current. Status variables, such as levitation and fault status, are also indicated on the GUI. Finally, a System Information window on the right gives version information for the GUI, firmware, parameter file and machine serial number specifier.
More detailed information displays and functionalities can be accessed through the action buttons: Digital Signal Processors (DSP) Actions, View Logs, Fault Summary, View/Set Parameters and Measurements.
Such additional functionality includes the following:
- Transfer function measurement- plant transfer function, compensator transfer function, open loop transfer function, closed loop transfer function and sensitivity transfer function
- Logs- fault, event, ESD data, machine specific calibration and system data
- Scope- internal high frequency measurements for key operating signals, such as rotor motion and coil current (actuator forces)
- Continuous data acquisition- long-term recording of high-frequency data, such as position, current and speed for disk storage
Why Choose Active Magnetic Bearings?
Active Magnetic Bearings (AMBs) have been used in commercial rotating machinery for over 30 years because they offer excellent performance over long operational lifespans. This is possible because they operate with few friction elements and no wearable parts or components. In recent years, OEMs have increased the adoption of magnetic bearing systems, leading to significant lifecycle cost reduction and increased market penetration across diverse industries.
AMB Advantages
- No physical contact between rotating and stationary components
- Environmentally friendly operation - no lubrication system required
- Fully functional in harsh environments
- Low power losses
- Dynamic testing, health-monitoring, and data-logging capabilities
To learn more about these and additional advantages Calnetix AMB systems can offer your application, visit our AMB Resource Page.
Resources
View More
White Paper
How Magnetic Bearings Work
White Paper
How A Magnetic Bearing Controller Works
Advantages
Advantages of Magnetic Bearings
Technical Paper
Transient Simulation of Magnetic Bearing and Backup Bearing Interaction in a High Speed Rotary Atomizer Subjected to Impulsive Loads
Technical Paper
Design and Shop Testing of a 165kW Cryogenic Expander/Generator on Magnetic Bearings
Technical Paper
Comparative Study of Axial/Radial Magnetic Bearing Arrangements for Turbocompressor Applications